Estado - Actualizaciones
Estado actual: Proyecto terminado en marzo de 2026.
Video demostración del funcionamiento.
Colaboraciones
Agradezco su colaboración a:
Héctor Ferrari por cederme el equipo Yaesu FT-80C.
Daniel Fazzio LW5HAO por ayudarme en la fabricación de la antena de 7 MHz y en la instalación del equipo en el móvil.
Licencia
Este proyecto se distribuye bajo licencia Creative Commons Atribución-Compartir Igual 4.0 Internacional (CC BY-SA 4.0). Esto significa que puedes compartirlo, modificarlo y utilizarlo libremente, siempre que reconozcas la autoría y compartas tus mejoras con la misma libertad.
Contacto
Email: mail@nicolasvasconi.ar
Telegram: @nicolasvasconi
Historia
Este proyecto nace de la necesidad de operar mi Yaesu FT-80C a distancia sin depender de una computadora. En mi caso lo utilizo para controlar el equipo, que está instalado en el baúl del auto, desde la posición del conductor. Quería algo sencillo, que pudiera manejar desde el teléfono móvil y que quedara integrado de forma limpia.
Inicialmente intenté conectar el puerto CAT usando un cable al puerto USB del teléfono, pero Android impide la gestión directa de datos a menos que sea desde una aplicación nativa. Como no quería desarrollar una app nativa por su costo y por el mantenimiento constante que requiere, decidí crear una página web que hiciera las veces de aplicación.
La idea fue que la página estuviera alojada dentro del propio microcontrolador (y no en el teléfono), evitando así las restricciones de Android. De esta forma el microcontrolador funciona en modo servidor web y entrega la página que actúa como “app”.
Principio de funcionamiento
El corazón del proyecto es un microcontrolador ESP8266 (en una placa NodeMCU). Le cargué un firmware que lo convierte en un pequeño punto de acceso WiFi y en un servidor web.
El protocolo CAT del Yaesu FT-80C es simple pero muy funcional: permite controlar la frecuencia, el modo, el paso de sintonía y otros parámetros. Investigué el protocolo en el manual original del equipo y programé el ESP8266 para que pueda hablar en ese idioma.
Cuando te conectas a la red WiFi del microcontrolador desde el teléfono o una tablet, puedes abrir cualquier navegador y acceder a la página web que está almacenada en la memoria del ESP8266. Esta página tiene botones y controles para manejar la radio. Al tocarlos, se envían órdenes al programa principal, que a su vez transmite los comandos CAT hacia el puerto del equipo.
El resultado es que puedes cambiar la frecuencia, la banda o el modo del FT-80C desde el teléfono.
Por ahora el audio (micrófono y parlante) y el PTT siguen yendo por cable, pero estoy pensando en una segunda versión que transmita también la voz por WiFi, eliminando completamente el cableado.
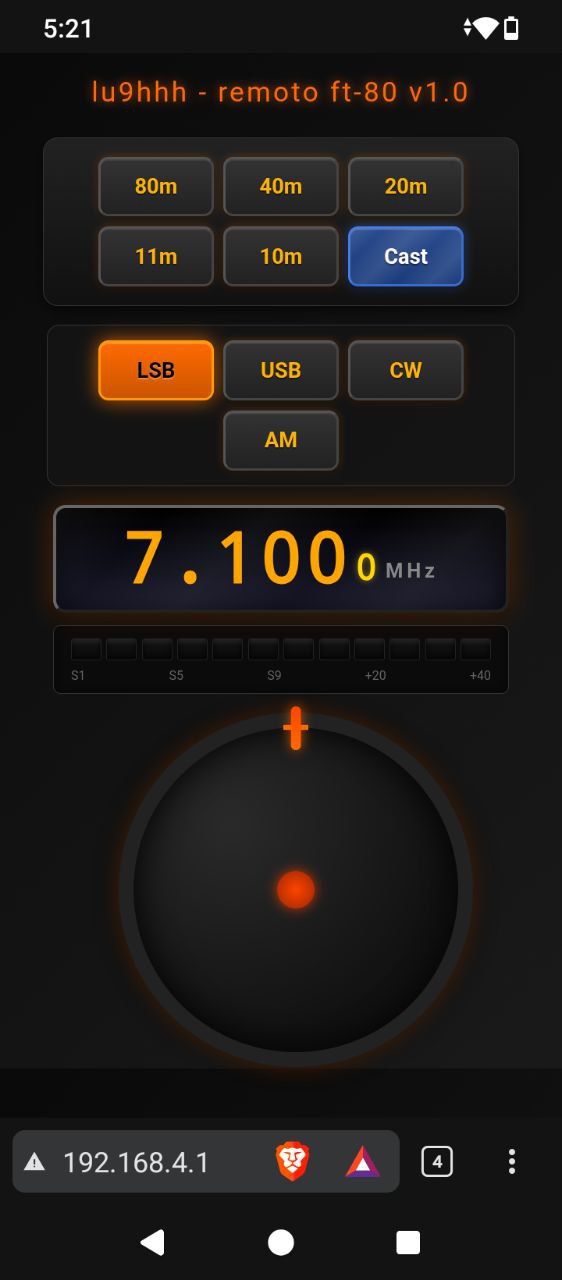
Foto ilustrativa de la página "app"
Documentación sobre el protocolo CAT del Yaesu FT-80C
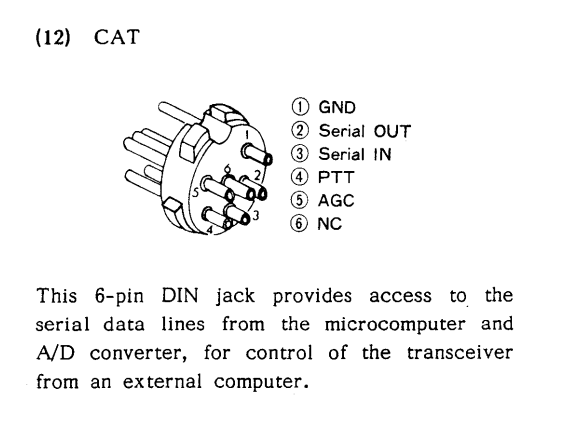
Distribución de pines del puerto CAT. El pin que utilizamos es el número 3 (IN o RX).
En el siguiente enlace se encuentra la información del protocolo extraída del manual de usuario original del equipo.
Descargar hoja de datos del protocolo CAT del Yaesu FT-80C
Nota: Si tu equipo utiliza un protocolo CAT diferente, tendrás que modificar las funciones
sendFreqToRig(float freq) y sendModeToRig(String mode) dentro del firmware para adaptarlas. El resto de la lógica web debería poder reutilizarse sin demasiados cambios.
Circuito esquemático
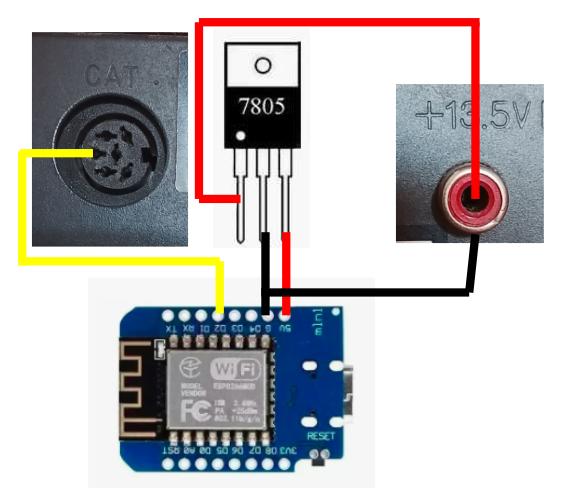
Utilicé un regulador 7805 para alimentar el NodeMCU. La tensión de alimentación se toma del conector RCA trasero que provee el propio Yaesu FT-80C. Cuando el equipo está encendido, en ese punto hay aproximadamente 13,8 V.
Los 5 V regulados se conectan al pin de 5 V del NodeMCU, que es la entrada de su propio regulador interno.
Es importante recordar que el ESP8266 trabaja a 3,3 V, mientras que el puerto CAT del FT-80C espera niveles entre 0 y 5 V. En la práctica conectando directamente la salida RX del microcontrolador (3,3 V) al pin CAT del equipo la cosa funciona perfectamente. No es necesario adaptar niveles.
Firmware
Aquí está el código fuente del proyecto. Puedes usarlo, estudiarlo, modificarlo y mejorarlo libremente.
Descargar Firmware (.ino de Arduino)
Implementación
En la parte trasera del equipo, justo al lado del conector CAT, coloqué una pequeña caja impresa en 3D. Dentro va toda la circuitería. El conjunto ocupa muy poco espacio y queda integrado al equipo de forma bastante discreta.

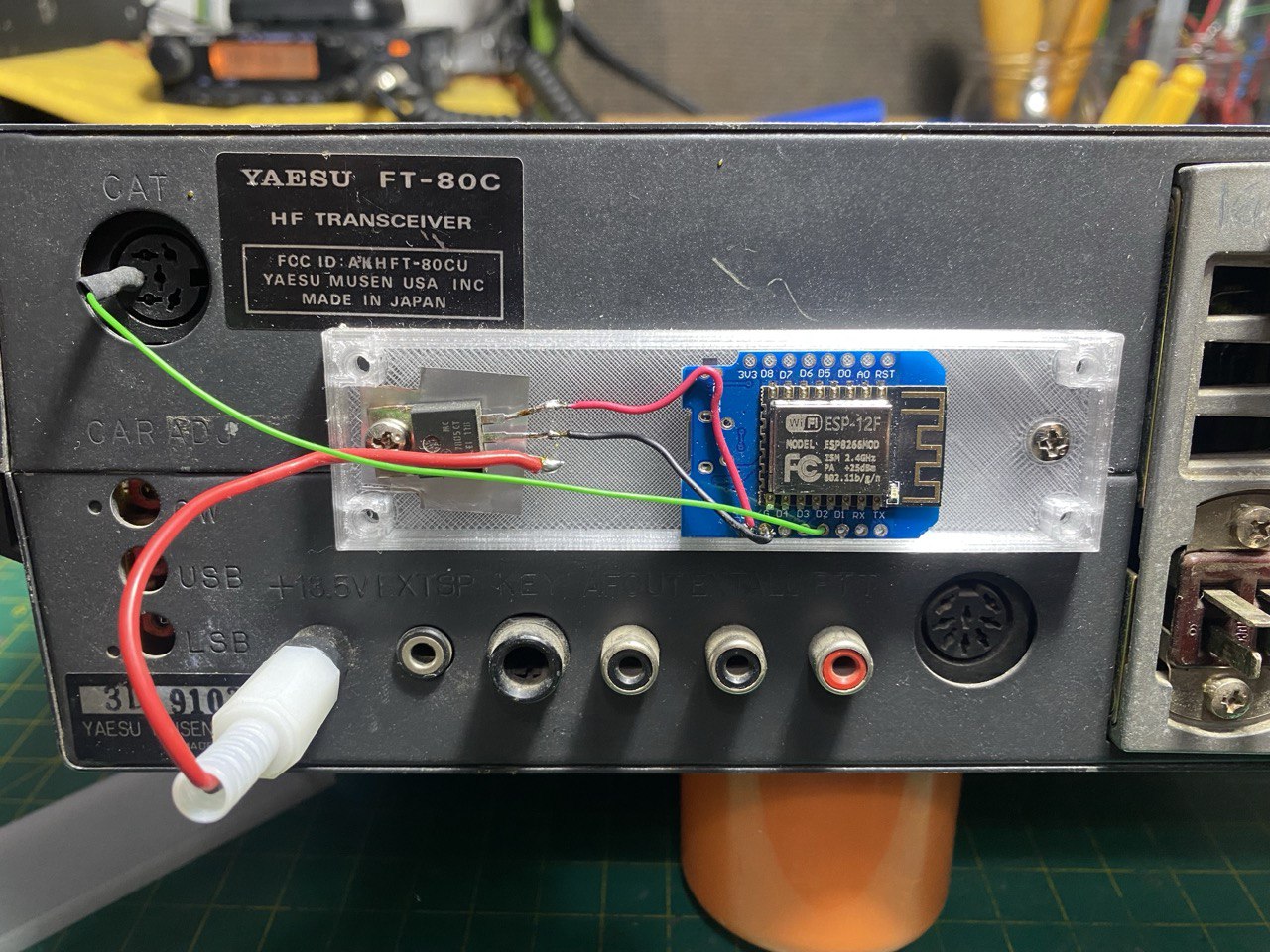
Fotos de la electrónica ya instalada.
Cierre
Es interesante poder extender las posibilidades de estos equipos antiguos que, cuando fueron diseñados, todavía no contaban con tecnologías como WiFi o interfaces web. La flexibilidad del puerto CAT invita a seguir explorando nuevas soluciones.
Si el proyecto te resulta interesante y haces alguna mejora, me encantaría que la compartas conmigo. Será un gusto conocer otras ideas o implementaciones.
73 DX!
← Volver al índice